ROS 是 Robot Operating System 的缩写,通常称为“机器人操作系统”。但它并不是一个真正的操作系统,而是一个面向机器人的开源的元操作系统(meta-operating system),提供类似传统操作系统的诸多功能:硬件抽象...
”ROS 机器人操作系统“ 的搜索结果

MOOC《机器人操作系统入门》 课 程配套讲义
ROS1中所有节点都需要在节点管理器ROS Master的管理下进行工作,一旦Master出现问题,系统就面临宕机的风险,ROS2实现了真正的分布式,不再有Master这个角色,借助一种全新的通信框架DDS,为所有节点的通信提供可靠...
VMware虚拟机软件安装,打开网址https://www.vmware.com/cn/products/workstation-pro/workstation-pro-evaluation.html,如图所示界面中点击DOWNLOAD NOW进行下载,下载完成后打开进行安装,在安装向导中选择下一步...

目錄 前言 第一章 ROS简介 机器人时代的到来 ROS发展历程 什么是ROS 安装ROS 安装ROS-Academy-for-Beginners教学包 二进制与源码包 安装RoboWare Studio ...3中国大学MOOC---《机器人操作系统入门》 课 程讲义
自己总结的ROS基本操作
ROS机器人操作系统功能包.rar
利用git clone https://github.com/osrf/gazebo_models下载速度太慢 我就利用gitee下载,这个是rosnoetic 版本的最新 gazebo_models 下载后直接解压缩到 /usr/share/gazebo-11/models 下即可使用。
ROS机器人操作系统-简要概述
标签: 机器人
ROS机器人操作系统的简要概述
ROS是面向机器人的开源的元操作系统,本书主要机器人操作系统的入门级介绍
本课程面向智能移动机器人和自动驾驶技术感兴趣的同学,以TURTLEBOT机器人为载体,系统性地介绍RoS机器人操作系统的基本原理和核心功能。本课程以动手操作为中心,零基础轻松入门并掌握ROS系统的基本操作和运动控制...
热门的ROS操作系统,快速了解ROS机器人操作系统的应用
ROS机器人操作系统基础
标签: 操作系统
ROS基础人操作系统,机器人操作系统相关基础知识
ROS机器人操作系统的安装、配置与初级教程.zip
ROS机器人操作系统.docx
ROS机器人操作系统基础教程,里面的教程很详细,对于初学者来说非常友好,非常的系统全面,我不是作者,如有侵权请联系本人删除
机器人操作系统@ 运行环境:Ubuntu18.04 微软云服务器(AzureUser@aitraining) /home/AzureUser/hcq/ROS ROS & SLAM个人笔记: 创建工作空间与功能包详解: 编译和运行 // 1 设置工作空间 cd catkin_wp/src catkin_...

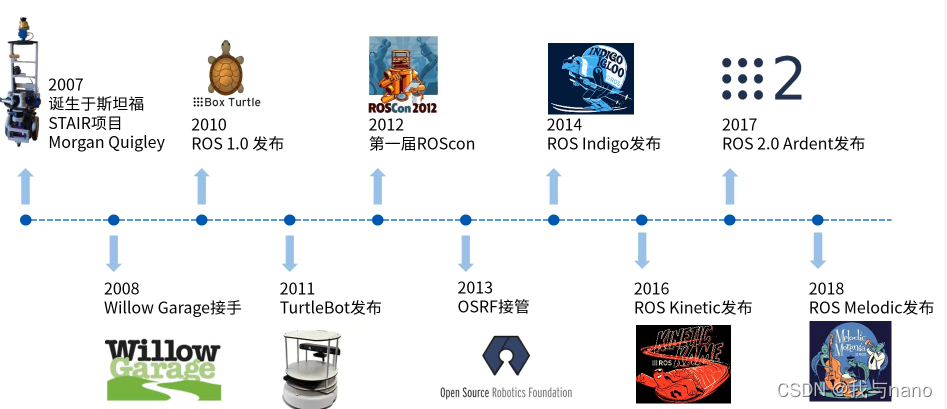
关于人工智能的研究进入了大发展阶段,包括全方位的具体的AI,例如斯坦福大学人工智能实验室STAIR(Stanford Artificial Intelligence Robot)项目,该项目组创建了灵活的、动态的软件系统的原型,用于机器人技术。...
ROS机器人操作系统安装
标签: ROS
那么在学习使用ROS之前,首先问一个问题:为什么需要机器人操作系统?机器人操作系统与现有的Linux或Windows操作系统有什么不同呢? 大家知道,操作系统的诞生,就是为了提供硬件和软件间的接口,以便程序员编写程序时...
ROS机器人操作系统——知识点汇总 。
通过收集各种ROS项目和服务的指标来检查ROS社区的总体健康状况和发展。我们将7月和8月作为年度基准月份,因为它们往往会变慢一些,并成为社区活动的下限。因为Open Robotics和ROS社区非常注重隐私,并且我们以收集很...


一直收到关于win10的ros1和ros2安装不成功的求助,统一回答。 更新离线安装包,直接下载双击安装,如果遇到问题,把库补全。 下载链接: ROS1Melodic:https://download.csdn.net/download/ZhangRelay/14021107 ...
ROS 机器人操作系统进阶实战
标签: linux
ROS(Robot Operating System) 是一个开源的机器人操作系统,目的是提供开发平台、工具及生态给开发人员,可以让开发人员快速开发。本课程通过精心设计的案例,分析技术要点、理解运行原理,以达到举一反三的效果,...
201707ROS机器人操作系统年度指标报告,需要了解ROS机器人操作系统详细的使用或其他数据可以下载参考,内容非常详细。
推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地